
Les développeurs de Google ont créé un algorithme d’IA qui rendra les suggestions d’itinéraires sur Google Maps plus personnalisées.
Selon Google, le modèle, qui comprend 360 millions de paramètres, utilise les données de conduite réelles des utilisateurs de Google Maps pour analyser les facteurs qu’ils prennent en compte lorsqu’ils décident d’un itinéraire. Les calculs de l’IA incluent des informations telles que les temps de trajet, les péages, l’état des routes et les préférences personnelles.
Google explique que la technologie est basée sur une approche appelée « apprentissage par renforcement inverse » (IRL), dans laquelle le système apprend du comportement de l’utilisateur sur la base d’un nouvel algorithme IRL appelé « Receding Horizon Inverse Planning (RHIP) ».
la « planification inverse à horizon glissant » pour le proche et le lointain
Google indique qu’il travaille depuis plusieurs années avec Deepmind sur le RHIP. À proximité d’un itinéraire réel, l’algorithme utilise des modèles stochastiques à forte intensité de calcul pour envisager des options peu probables. Pour les zones plus éloignées, le RHIP passe à des méthodes déterministes plus simples afin d’économiser de l’énergie.
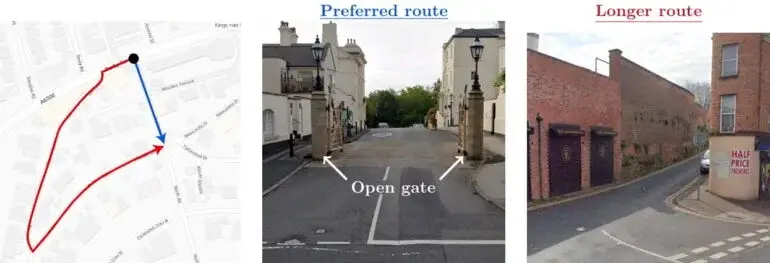
« Exemple de modèle à paramètres épars 360M trouvant et corrigeant une erreur de qualité des données à Nottingham.
L’itinéraire préféré est incorrectement marqué comme étant une propriété privée en raison de la présence d’un portail (qui n’est jamais fermé),
et entraîne à tort un coût élevé. L’itinéraire de déviation est long et étroit. Le modèle peu dense apprend à corriger l’erreur de
l’erreur de données avec une récompense positive importante dans le segment fermé » | Image : Google
Lors des tests, RHIP a été en mesure d’améliorer la précision de ses suggestions d’itinéraires de 16 à 24 % en moyenne pour les véhicules à moteur et à deux roues (scooters, motos, cyclomoteurs, etc.) par rapport à la version de base de Maps bien réglée. En combinant les approches d’intelligence artificielle, il est possible de maximiser les points forts de chacune d’entre elles. Le système apprend à partir des mouvements des utilisateurs de Google Maps et devrait améliorer sa prédiction de l’itinéraire qu’ils préfèrent au fil du temps.
Selon Google, les tentatives d’utilisation à grande échelle de systèmes d’IA pour la planification d’itinéraires ont souvent échoué en raison de l’énorme complexité des réseaux routiers du monde réel. Les algorithmes ne pouvaient pas faire face à la myriade de possibilités.
RHIP peut désormais surmonter cet obstacle grâce à une approche sophistiquée. Les développeurs de Google affirment que RHIP est la plus grande application de l’apprentissage par renforcement inverse pour la planification d’itinéraires à ce jour, confirmant la tendance selon laquelle l’amélioration des performances est liée à l’échelle, à la fois en termes d’ensemble de données et de complexité du modèle.
L’algorithme a été appliqué aux données de Google Maps du monde entier. Toutefois, des tests approfondis auprès des utilisateurs sont nécessaires pour déterminer si la technique fonctionne dans la pratique et produit effectivement de meilleurs itinéraires.
